|
RcsPySim
A robot control and simulation library
|


|
|
RcsPySim
A robot control and simulation library
|
|
#include "PolicyComponent.h"#include "action/ActionModel.h"#include "action/ActionModelIK.h"#include "action/AMDynamicalSystemActivation.h"#include "action/AMJointControlPosition.h"#include "observation/OMCollisionCost.h"#include "util/eigen_matnd.h"#include "util/string_format.h"#include <EntityBase.h>#include <Rcs_macros.h>#include <Rcs_typedef.h>#include <Rcs_cmdLine.h>#include <memory>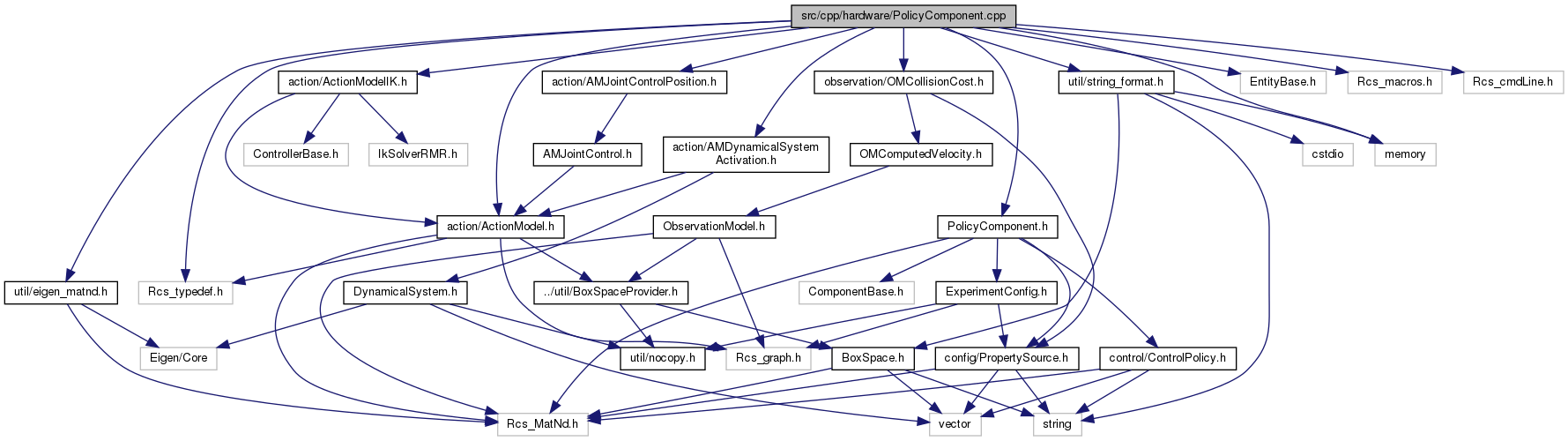
Go to the source code of this file.
Macros | |
| #define | SUBSCRIBE(name) ComponentBase::subscribe(#name, &PolicyComponent::on##name) |
| #define SUBSCRIBE | ( | name | ) | ComponentBase::subscribe(#name, &PolicyComponent::on##name) |
 1.8.13
1.8.13