|
RcsPySim
A robot control and simulation library
|


|
|
RcsPySim
A robot control and simulation library
|
|
#include "AMJointControlAcceleration.h"#include <Rcs_typedef.h>#include <Rcs_dynamics.h>#include <Rcs_macros.h>#include <Rcs_VecNd.h>#include <limits>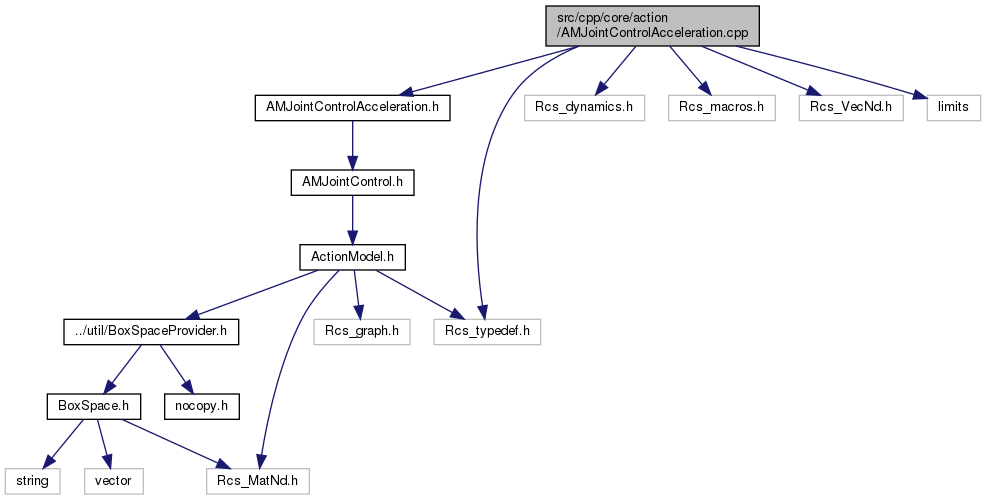
Go to the source code of this file.
Namespaces | |
| Rcs | |
 1.8.13
1.8.13