|
RcsPySim
A robot control and simulation library
|


|
|
RcsPySim
A robot control and simulation library
|
|
#include "DynamicalSystem.h"#include "../config/PropertySource.h"#include "../util/eigen_matnd.h"#include <Rcs_macros.h>#include <memory>#include <iostream>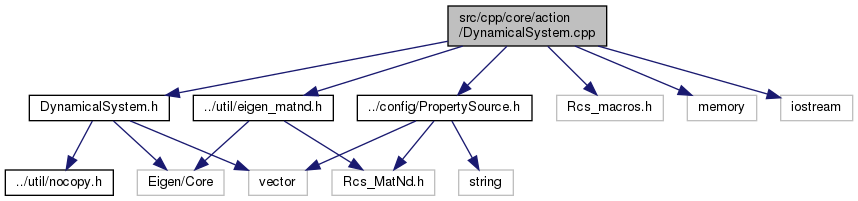
Go to the source code of this file.
Namespaces | |
| Rcs | |
Functions | |
| static bool | Rcs::getMatrixProperty (Eigen::MatrixXd &out, PropertySource *ps, const char *property, unsigned int expectedRows, unsigned int expectedCols) |
| static bool | Rcs::getVectorProperty (Eigen::VectorXd &out, PropertySource *ps, const char *property, unsigned int expectedSize) |
 1.8.13
1.8.13