|
RcsPySim
A robot control and simulation library
|


|
|
RcsPySim
A robot control and simulation library
|
|
#include "ExperimentConfig.h"#include "action/AMNormalized.h"#include "observation/ObservationModel.h"#include "observation/OMNormalized.h"#include "observation/OMPartial.h"#include "physics/PhysicsParameterManager.h"#include <Rcs_resourcePath.h>#include <Rcs_macros.h>#include <Rcs_basicMath.h>#include <map>#include <string>#include <stdexcept>#include <sstream>#include <Rcs_parser.h>#include <Rcs_collisionModel.h>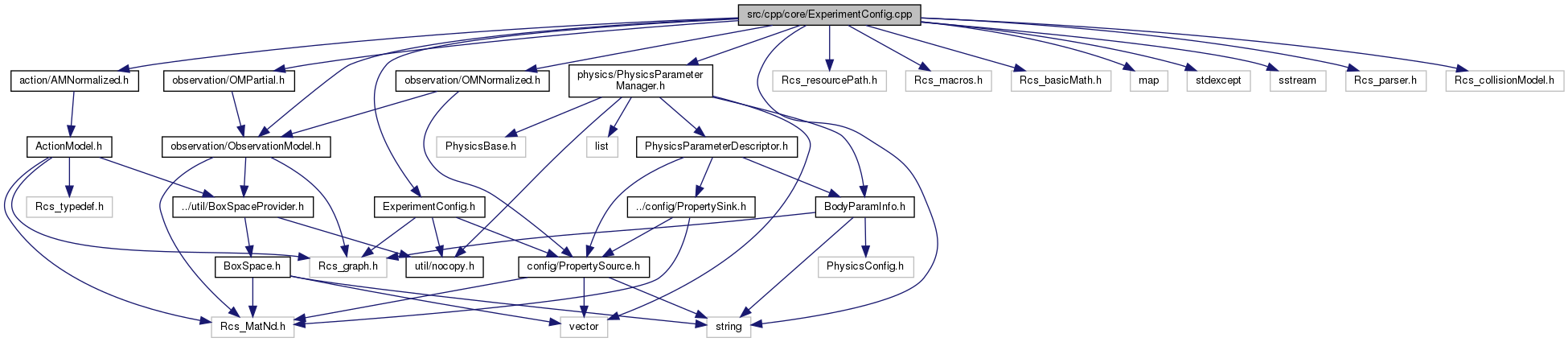
Go to the source code of this file.
Namespaces | |
| Rcs | |
Functions | |
| static void | Rcs::copy_prop_to_xml_attr (xmlNodePtr node, PropertySource *source, const char *name, const char *xmlName=nullptr) |
| RcsCollisionMdl * | Rcs::RcsCollisionModel_createFromConfig (RcsGraph *graph, PropertySource *config) |
Variables | |
| static std::map< std::string, ExperimentConfig::ExperimentConfigCreateFunction > | Rcs::registry |
 1.8.13
1.8.13