|
RcsPySim
A robot control and simulation library
|


|
|
RcsPySim
A robot control and simulation library
|
|
#include <AMPlatePos5D.h>
Public Member Functions | |
| AMPlatePos5D (RcsGraph *graph) | |
| virtual | ~AMPlatePos5D () |
| virtual ActionModel * | clone (RcsGraph *newGraph) const |
| virtual unsigned int | getDim () const |
| virtual void | getMinMax (double *min, double *max) const |
| virtual std::vector< std::string > | getNames () const |
| virtual void | computeCommand (MatNd *q_des, MatNd *q_dot_des, MatNd *T_des, const MatNd *action, double dt) |
| virtual void | getStableAction (MatNd *action) const |
 Public Member Functions inherited from Rcs::ActionModelIK Public Member Functions inherited from Rcs::ActionModelIK | |
| ActionModelIK (RcsGraph *graph) | |
| ActionModelIK (RcsGraph *graph, std::vector< Task *> tasks) | |
| virtual | ~ActionModelIK () |
| virtual void | reset () |
| const ControllerBase * | getController () const |
| RcsGraph * | getDesiredGraph () const |
| void | setDesiredGraph (RcsGraph *newGraph) |
| void | setupCollisionModel (const RcsCollisionMdl *modelToCopy) |
| void | computeIK (MatNd *q_des, MatNd *q_dot_des, MatNd *T_des, const MatNd *x_des, double dt) |
| void | computeIKVel (MatNd *q_des, MatNd *q_dot_des, MatNd *T_des, const MatNd *x_dot_des, double dt) |
| Public Member Functions inherited from Rcs::ActionModel | |
| ActionModel (RcsGraph *graph) | |
| virtual | ~ActionModel () |
| ActionModel * | clone () const |
| RcsGraph * | getGraph () |
| void | setGraph (RcsGraph *newGraph) |
| virtual ActionModel * | getWrappedActionModel () const |
| const ActionModel * | unwrapAll () const |
| ActionModel * | unwrapAll () |
| template<typename AM > | |
| const AM * | unwrap () const |
| template<typename AM > | |
| AM * | unwrap () |
| Public Member Functions inherited from Rcs::BoxSpaceProvider | |
| BoxSpaceProvider () | |
| virtual | ~BoxSpaceProvider () |
| BoxSpaceProvider (const BoxSpaceProvider &)=delete | |
| BoxSpaceProvider & | operator= (const BoxSpaceProvider &)=delete |
| BoxSpaceProvider (BoxSpaceProvider &&)=delete | |
| BoxSpaceProvider & | operator= (BoxSpaceProvider &&)=delete |
| const BoxSpace * | getSpace () const |
Additional Inherited Members | |
| Protected Member Functions inherited from Rcs::ActionModelIK | |
| void | addTask (Task *task) |
| void | addFixedTask (Task *task, MatNd *value) |
| unsigned int | getNumActiveTasks () const |
| void | ikFromDX (MatNd *q_des, MatNd *q_dot_des, double dt) const |
| Protected Attributes inherited from Rcs::ActionModelIK | |
| RcsGraph * | desiredGraph |
| RcsCollisionMdl * | collisionMdl |
| MatNd * | dx_des |
| MatNd * | dH |
| MatNd * | dq_ref |
| Protected Attributes inherited from Rcs::ActionModel | |
| RcsGraph * | graph |
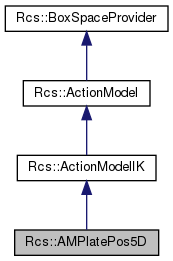
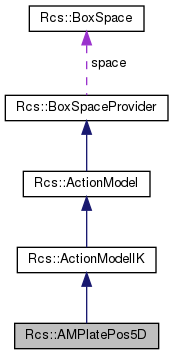
Controls X, Y, Z position and X, Y rotation of the Plate body relative to it's initial position.
Definition at line 43 of file AMPlatePos5D.h.
| Rcs::AMPlatePos5D::AMPlatePos5D | ( | RcsGraph * | graph | ) |
Definition at line 46 of file AMPlatePos5D.cpp.
|
virtual |
Definition at line 65 of file AMPlatePos5D.cpp.
|
virtual |
Create a deep copy of this action model. The graph the action model operates on is replaced with newGraph.
| newGraph | optionally, replace the graph used with newGraph. |
Implements Rcs::ActionModel.
Definition at line 123 of file AMPlatePos5D.cpp.
|
virtual |
Compute the joint commands from a specified action and the current state.
| [out] | q_des | desired joint positions |
| [out] | q_dot_des | desired joint velocities |
| [out] | T_des | desired joint torques |
| [in] | action | input action values |
| dt | difference in time since the last call. |
Implements Rcs::ActionModel.
Definition at line 100 of file AMPlatePos5D.cpp.
|
virtual |
Provides the number of elements in the space. Since the BoxSpace object will be cached, this must not change.
Implements Rcs::BoxSpaceProvider.
Definition at line 69 of file AMPlatePos5D.cpp.
|
virtual |
Provides minimum and maximum values for the space.
The passed arrays will be large enough to hold getDim() values.
| [out] | min | minimum value storage |
| [out] | max | maximum value storage |
Implements Rcs::BoxSpaceProvider.
Definition at line 74 of file AMPlatePos5D.cpp.
|
virtual |
Provides names for each entry of the space.
These are intended for use in python, i.e., for pandas dataframe column names.
Reimplemented from Rcs::BoxSpaceProvider.
Definition at line 95 of file AMPlatePos5D.cpp.
|
virtual |
Obtain action values which would keep the system in the current state. For action variables which are velocities or accelerations, this should be 0. For action variables which are positions, this should be the current position.
| [out] | action | matrix to write the values into |
Implements Rcs::ActionModel.
Definition at line 111 of file AMPlatePos5D.cpp.
 1.8.13
1.8.13