#include <PolicyComponent.h>
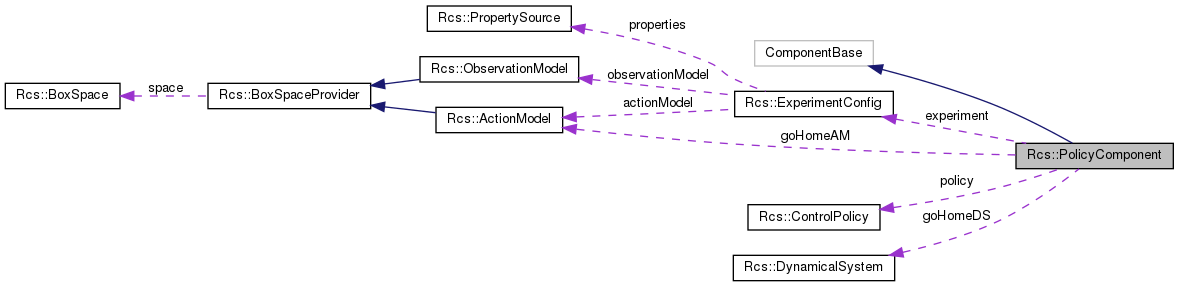
Wraps RcsPySim Experiment and ControlPolicy for use in ECS.
Definition at line 49 of file PolicyComponent.h.
◆ PolicyComponent()
| Rcs::PolicyComponent::PolicyComponent |
( |
EntityBase * |
entity, |
|
|
PropertySource * |
settings, |
|
|
bool |
computeJointVelocities = false |
|
) |
| |
◆ ~PolicyComponent()
| Rcs::PolicyComponent::~PolicyComponent |
( |
| ) |
|
|
virtual |
◆ getAction()
| const MatNd * Rcs::PolicyComponent::getAction |
( |
| ) |
const |
◆ getDesiredGraph()
| RcsGraph * Rcs::PolicyComponent::getDesiredGraph |
( |
| ) |
const |
◆ getJointCommandPtr()
| const MatNd * Rcs::PolicyComponent::getJointCommandPtr |
( |
| ) |
const |
◆ getObservation()
| const MatNd * Rcs::PolicyComponent::getObservation |
( |
| ) |
const |
◆ getPolicy()
◆ getStateText()
| std::string Rcs::PolicyComponent::getStateText |
( |
| ) |
const |
◆ onEmergencyRecover()
| void Rcs::PolicyComponent::onEmergencyRecover |
( |
| ) |
|
|
private |
◆ onEmergencyStop()
| void Rcs::PolicyComponent::onEmergencyStop |
( |
| ) |
|
|
private |
◆ onGoHome()
| void Rcs::PolicyComponent::onGoHome |
( |
| ) |
|
|
private |
◆ onInitFromState()
| void Rcs::PolicyComponent::onInitFromState |
( |
const RcsGraph * |
target | ) |
|
|
private |
◆ onPolicyPause()
| void Rcs::PolicyComponent::onPolicyPause |
( |
| ) |
|
|
private |
◆ onPolicyReset()
| void Rcs::PolicyComponent::onPolicyReset |
( |
| ) |
|
|
private |
◆ onPolicyStart()
| void Rcs::PolicyComponent::onPolicyStart |
( |
| ) |
|
|
private |
◆ onPrint()
| void Rcs::PolicyComponent::onPrint |
( |
| ) |
|
|
private |
◆ onRender()
| void Rcs::PolicyComponent::onRender |
( |
| ) |
|
|
private |
◆ onUpdatePolicy()
| void Rcs::PolicyComponent::onUpdatePolicy |
( |
const RcsGraph * |
state | ) |
|
|
private |
◆ RCSPYSIM_NOCOPY_NOMOVE()
◆ setCollisionCheck()
| void Rcs::PolicyComponent::setCollisionCheck |
( |
bool |
collisionCheck | ) |
|
◆ setJointLimitCheck()
| void Rcs::PolicyComponent::setJointLimitCheck |
( |
bool |
jointLimitCheck | ) |
|
◆ subscribe()
| void Rcs::PolicyComponent::subscribe |
( |
| ) |
|
|
private |
◆ action
| MatNd* Rcs::PolicyComponent::action |
|
private |
◆ collisionCheck
| bool Rcs::PolicyComponent::collisionCheck |
|
private |
◆ collisionMdl
| RcsCollisionMdl* Rcs::PolicyComponent::collisionMdl |
|
private |
◆ computeJointVelocities
| bool Rcs::PolicyComponent::computeJointVelocities |
|
private |
◆ desiredGraph
| RcsGraph* Rcs::PolicyComponent::desiredGraph |
|
private |
◆ eRec
| bool Rcs::PolicyComponent::eRec |
|
private |
◆ eStop
| bool Rcs::PolicyComponent::eStop |
|
private |
◆ experiment
◆ goHome
| bool Rcs::PolicyComponent::goHome |
|
private |
◆ goHomeAM
◆ goHomeDS
◆ jointLimitCheck
| bool Rcs::PolicyComponent::jointLimitCheck |
|
private |
◆ observation
| MatNd* Rcs::PolicyComponent::observation |
|
private |
◆ policy
◆ policyActive
| bool Rcs::PolicyComponent::policyActive |
|
private |
◆ renderingInitialized
| bool Rcs::PolicyComponent::renderingInitialized |
|
private |
◆ T_ctrl
| MatNd* Rcs::PolicyComponent::T_ctrl |
|
private |
The documentation for this class was generated from the following files:


 1.8.13
1.8.13