|
RcsPySim
A robot control and simulation library
|


|
|
RcsPySim
A robot control and simulation library
|
|
#include <AMJointControl.h>
Public Member Functions | |
| AMJointControl (RcsGraph *graph) | |
| virtual | ~AMJointControl () |
| virtual unsigned int | getDim () const |
 Public Member Functions inherited from Rcs::ActionModel Public Member Functions inherited from Rcs::ActionModel | |
| ActionModel (RcsGraph *graph) | |
| virtual | ~ActionModel () |
| ActionModel * | clone () const |
| virtual ActionModel * | clone (RcsGraph *newGraph) const =0 |
| virtual void | computeCommand (MatNd *q_des, MatNd *q_dot_des, MatNd *T_des, const MatNd *action, double dt)=0 |
| virtual void | reset () |
| virtual void | getStableAction (MatNd *action) const =0 |
| RcsGraph * | getGraph () |
| void | setGraph (RcsGraph *newGraph) |
| virtual ActionModel * | getWrappedActionModel () const |
| const ActionModel * | unwrapAll () const |
| ActionModel * | unwrapAll () |
| template<typename AM > | |
| const AM * | unwrap () const |
| template<typename AM > | |
| AM * | unwrap () |
| Public Member Functions inherited from Rcs::BoxSpaceProvider | |
| BoxSpaceProvider () | |
| virtual | ~BoxSpaceProvider () |
| BoxSpaceProvider (const BoxSpaceProvider &)=delete | |
| BoxSpaceProvider & | operator= (const BoxSpaceProvider &)=delete |
| BoxSpaceProvider (BoxSpaceProvider &&)=delete | |
| BoxSpaceProvider & | operator= (BoxSpaceProvider &&)=delete |
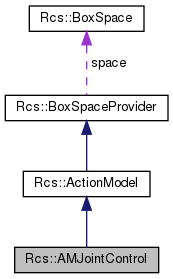
| const BoxSpace * | getSpace () const |
| virtual void | getMinMax (double *min, double *max) const =0 |
| virtual std::vector< std::string > | getNames () const |
Additional Inherited Members | |
| Protected Attributes inherited from Rcs::ActionModel | |
| RcsGraph * | graph |
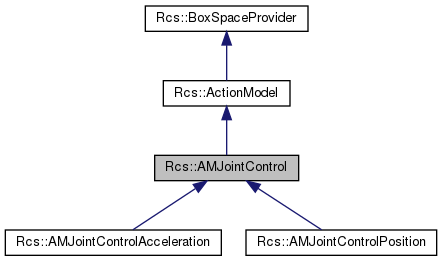
Base class for all action models controlling the unconstrained joints of the graph directly (no IK).
Definition at line 42 of file AMJointControl.h.
|
explicit |
|
virtual |
Definition at line 43 of file AMJointControl.cpp.
|
virtual |
Returns graph->nJ since we control all unconstrained joints.
Implements Rcs::BoxSpaceProvider.
Definition at line 48 of file AMJointControl.cpp.
 1.8.13
1.8.13