|
RcsPySim
A robot control and simulation library
|


|
|
RcsPySim
A robot control and simulation library
|
|
#include <OMDynamicalSystemDiscrepancy.h>
Public Member Functions | |
| OMDynamicalSystemDiscrepancy (AMDynamicalSystemActivation *actionModel) | |
| virtual | ~OMDynamicalSystemDiscrepancy () |
| virtual unsigned int | getStateDim () const |
| unsigned int | getVelocityDim () const override |
| virtual void | computeObservation (double *state, double *velocity, const MatNd *currentAction, double dt) const |
| void | reset () override |
| virtual std::vector< std::string > | getStateNames () const |
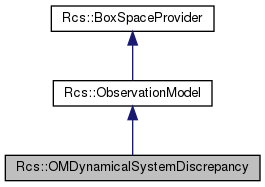
 Public Member Functions inherited from Rcs::ObservationModel Public Member Functions inherited from Rcs::ObservationModel | |
| virtual | ~ObservationModel () |
| MatNd * | computeObservation (const MatNd *currentAction, double dt) const |
| void | computeObservation (MatNd *observation, const MatNd *currentAction, double dt) const |
| virtual void | getLimits (double *minState, double *maxState, double *maxVelocity) const |
| virtual std::vector< std::string > | getVelocityNames () const |
| virtual void | getMinMax (double *min, double *max) const final |
| virtual unsigned int | getDim () const final |
| virtual std::vector< std::string > | getNames () const final |
| template<typename OM > | |
| OM * | findModel () |
| template<typename OM > | |
| Offsets | findOffsets () |
| virtual std::vector< ObservationModel * > | getNested () const |
| Public Member Functions inherited from Rcs::BoxSpaceProvider | |
| BoxSpaceProvider () | |
| virtual | ~BoxSpaceProvider () |
| BoxSpaceProvider (const BoxSpaceProvider &)=delete | |
| BoxSpaceProvider & | operator= (const BoxSpaceProvider &)=delete |
| BoxSpaceProvider (BoxSpaceProvider &&)=delete | |
| BoxSpaceProvider & | operator= (BoxSpaceProvider &&)=delete |
| const BoxSpace * | getSpace () const |
Private Attributes | |
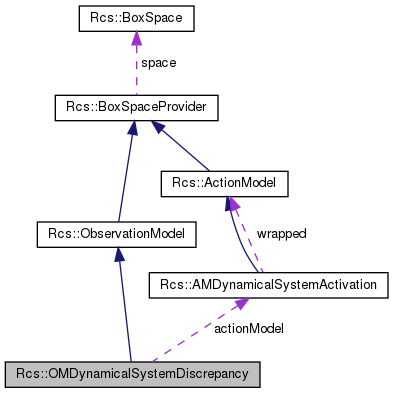
| AMDynamicalSystemActivation * | actionModel |
| ControllerBase * | controller |
| MatNd * | x_curr |
ObservationModel wrapping multiple AMDynamicalSystemActivation to compute the discrepancies between the task space changes commanded by the DS and the ones executed by the robot.
Definition at line 47 of file OMDynamicalSystemDiscrepancy.h.
|
explicit |
Create from action model. NOTE: assumes that the task activation action model wraps a IK-based action model.
Definition at line 42 of file OMDynamicalSystemDiscrepancy.cpp.
|
virtual |
Definition at line 61 of file OMDynamicalSystemDiscrepancy.cpp.
|
virtual |
Implement to fill the observation vector with the observed values.
| [out] | state | state observation vector to fill, has getStateDim() elements. |
| [out] | velocity | velocity observation vector to fill, has getVelocityDim() elements. |
| [in] | currentAction | action in current step. May be NULL if not available. |
| [in] | dt | time step since the last observation has been taken |
Implements Rcs::ObservationModel.
Definition at line 72 of file OMDynamicalSystemDiscrepancy.cpp.
|
virtual |
The number of state variables.
Implements Rcs::ObservationModel.
Definition at line 67 of file OMDynamicalSystemDiscrepancy.cpp.
|
virtual |
Provides names for each state entry.
Reimplemented from Rcs::ObservationModel.
Definition at line 110 of file OMDynamicalSystemDiscrepancy.cpp.
|
overridevirtual |
The number of velocity variables. The default implementation assumes that for each state there is a velocity.
Reimplemented from Rcs::ObservationModel.
Definition at line 56 of file OMDynamicalSystemDiscrepancy.cpp.
|
overridevirtual |
Reset any internal state. This is called to begin a new episode. It should also reset values depending on modifiable physics parameters. This is an optional operation, so the default implementation does nothing.
Reimplemented from Rcs::ObservationModel.
Definition at line 104 of file OMDynamicalSystemDiscrepancy.cpp.
|
private |
Definition at line 73 of file OMDynamicalSystemDiscrepancy.h.
|
private |
Definition at line 76 of file OMDynamicalSystemDiscrepancy.h.
|
private |
Definition at line 79 of file OMDynamicalSystemDiscrepancy.h.
 1.8.13
1.8.13