|
RcsPySim
A robot control and simulation library
|


|
|
RcsPySim
A robot control and simulation library
|
|
#include <OMJointState.h>
Public Member Functions | |
| OMJointState (RcsGraph *graph, const char *jointName, bool wrapJointAngle) | |
| OMJointState (RcsGraph *graph, const char *jointName) | |
| virtual | ~OMJointState () |
| virtual unsigned int | getStateDim () const |
| virtual unsigned int | getVelocityDim () const |
| virtual void | computeObservation (double *state, double *velocity, const MatNd *currentAction, double dt) const |
| virtual void | getLimits (double *minState, double *maxState, double *maxVelocity) const |
| virtual std::vector< std::string > | getStateNames () const |
 Public Member Functions inherited from Rcs::ObservationModel Public Member Functions inherited from Rcs::ObservationModel | |
| virtual | ~ObservationModel () |
| MatNd * | computeObservation (const MatNd *currentAction, double dt) const |
| void | computeObservation (MatNd *observation, const MatNd *currentAction, double dt) const |
| virtual void | reset () |
| virtual std::vector< std::string > | getVelocityNames () const |
| virtual void | getMinMax (double *min, double *max) const final |
| virtual unsigned int | getDim () const final |
| virtual std::vector< std::string > | getNames () const final |
| template<typename OM > | |
| OM * | findModel () |
| template<typename OM > | |
| Offsets | findOffsets () |
| virtual std::vector< ObservationModel * > | getNested () const |
| Public Member Functions inherited from Rcs::BoxSpaceProvider | |
| BoxSpaceProvider () | |
| virtual | ~BoxSpaceProvider () |
| BoxSpaceProvider (const BoxSpaceProvider &)=delete | |
| BoxSpaceProvider & | operator= (const BoxSpaceProvider &)=delete |
| BoxSpaceProvider (BoxSpaceProvider &&)=delete | |
| BoxSpaceProvider & | operator= (BoxSpaceProvider &&)=delete |
| const BoxSpace * | getSpace () const |
Static Public Member Functions | |
| static ObservationModel * | observeAllJoints (RcsGraph *graph) |
| static ObservationModel * | observeUnconstrainedJoints (RcsGraph *graph) |
Private Member Functions | |
| OMJointState (RcsGraph *graph, RcsJoint *joint) | |
Private Attributes | |
| RcsGraph * | graph |
| RcsJoint * | joint |
| bool | wrapJointAngle |
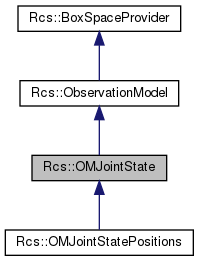
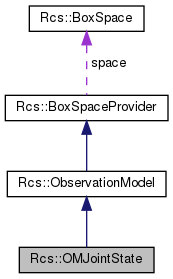
Observes joint positions and velocities for a single joint.
Definition at line 42 of file OMJointState.h.
| Rcs::OMJointState::OMJointState | ( | RcsGraph * | graph, |
| const char * | jointName, | ||
| bool | wrapJointAngle | ||
| ) |
Constructor
| graph | graph to observe |
| jointName | name of joint to observe |
| wrapJointAngle | whether to wrap the state of a rotational joint into the [-pi, pi] range. Use for unlimited rotation joints. |
Definition at line 54 of file OMJointState.cpp.
| Rcs::OMJointState::OMJointState | ( | RcsGraph * | graph, |
| const char * | jointName | ||
| ) |
Constructor Decides to wrap the joint angle if the joint's movement range is exactly [-pi, pi].
| graph | graph to observe |
| jointName | name of joint to observe |
Definition at line 70 of file OMJointState.cpp.
|
virtual |
Definition at line 82 of file OMJointState.cpp.
|
private |
Definition at line 75 of file OMJointState.cpp.
|
virtual |
Implement to fill the observation vector with the observed values.
| [out] | state | state observation vector to fill, has getStateDim() elements. |
| [out] | velocity | velocity observation vector to fill, has getVelocityDim() elements. |
| [in] | currentAction | action in current step. May be NULL if not available. |
| [in] | dt | time step since the last observation has been taken |
Implements Rcs::ObservationModel.
Definition at line 98 of file OMJointState.cpp.
|
virtual |
Provides the minimum and maximum observable values. Since the velocity is symmetric, only the maximum needs to be provided. The default implementation uses -inf and inf.
| [out] | minState | minimum state vector to fill, has getStateDim() elements. |
| [out] | maxState | maximum state vector to fill, has getStateDim() elements. |
| [out] | maxVelocity | maximum velocity vector to fill, has getVelocityDim() elements. |
Reimplemented from Rcs::ObservationModel.
Definition at line 108 of file OMJointState.cpp.
|
virtual |
The number of state variables.
Implements Rcs::ObservationModel.
Definition at line 88 of file OMJointState.cpp.
|
virtual |
Provides names for each state entry.
Reimplemented from Rcs::ObservationModel.
Definition at line 116 of file OMJointState.cpp.
|
virtual |
The number of velocity variables. The default implementation assumes that for each state there is a velocity.
Reimplemented from Rcs::ObservationModel.
Reimplemented in Rcs::OMJointStatePositions.
Definition at line 93 of file OMJointState.cpp.
|
static |
Definition at line 121 of file OMJointState.cpp.
|
static |
Definition at line 130 of file OMJointState.cpp.
|
private |
Definition at line 85 of file OMJointState.h.
|
private |
Definition at line 87 of file OMJointState.h.
|
private |
Definition at line 89 of file OMJointState.h.
 1.8.13
1.8.13