|
RcsPySim
A robot control and simulation library
|


|
|
RcsPySim
A robot control and simulation library
|
|
#include <OMTaskSpaceDiscrepancy.h>
Public Member Functions | |
| OMTaskSpaceDiscrepancy (const char *bodyName, const RcsGraph *controllerGraph, const RcsGraph *configGraph, double maxDiscrepancy=1.) | |
| virtual | ~OMTaskSpaceDiscrepancy () |
| virtual unsigned int | getStateDim () const |
| unsigned int | getVelocityDim () const override |
| void | getLimits (double *minState, double *maxState, double *maxVelocity) const override |
| virtual void | computeObservation (double *state, double *velocity, const MatNd *currentAction, double dt) const |
| void | reset () override |
| virtual std::vector< std::string > | getStateNames () const |
 Public Member Functions inherited from Rcs::ObservationModel Public Member Functions inherited from Rcs::ObservationModel | |
| virtual | ~ObservationModel () |
| MatNd * | computeObservation (const MatNd *currentAction, double dt) const |
| void | computeObservation (MatNd *observation, const MatNd *currentAction, double dt) const |
| virtual std::vector< std::string > | getVelocityNames () const |
| virtual void | getMinMax (double *min, double *max) const final |
| virtual unsigned int | getDim () const final |
| virtual std::vector< std::string > | getNames () const final |
| template<typename OM > | |
| OM * | findModel () |
| template<typename OM > | |
| Offsets | findOffsets () |
| virtual std::vector< ObservationModel * > | getNested () const |
| Public Member Functions inherited from Rcs::BoxSpaceProvider | |
| BoxSpaceProvider () | |
| virtual | ~BoxSpaceProvider () |
| BoxSpaceProvider (const BoxSpaceProvider &)=delete | |
| BoxSpaceProvider & | operator= (const BoxSpaceProvider &)=delete |
| BoxSpaceProvider (BoxSpaceProvider &&)=delete | |
| BoxSpaceProvider & | operator= (BoxSpaceProvider &&)=delete |
| const BoxSpace * | getSpace () const |
Private Attributes | |
| RcsBody * | bodyController |
| RcsBody * | bodyConfig |
| double | maxDiscrepancy |
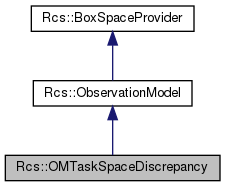
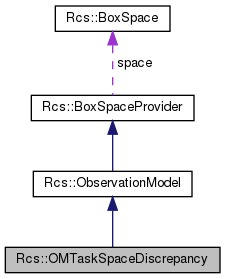
ObservationModel computing the discrepancy between a body's position in the desired graph (owned by the controller) and the current graph (owned by the config) in task space.
Definition at line 46 of file OMTaskSpaceDiscrepancy.h.
|
explicit |
Create from action model. NOTE: assumes that the task activation action model wraps a IK-based action model.
Definition at line 42 of file OMTaskSpaceDiscrepancy.cpp.
|
virtual |
Definition at line 55 of file OMTaskSpaceDiscrepancy.cpp.
|
virtual |
Implement to fill the observation vector with the observed values.
| [out] | state | state observation vector to fill, has getStateDim() elements. |
| [out] | velocity | velocity observation vector to fill, has getVelocityDim() elements. |
| [in] | currentAction | action in current step. May be NULL if not available. |
| [in] | dt | time step since the last observation has been taken |
Implements Rcs::ObservationModel.
Definition at line 78 of file OMTaskSpaceDiscrepancy.cpp.
|
overridevirtual |
Provides the minimum and maximum observable values. Since the velocity is symmetric, only the maximum needs to be provided. The default implementation uses -inf and inf.
| [out] | minState | minimum state vector to fill, has getStateDim() elements. |
| [out] | maxState | maximum state vector to fill, has getStateDim() elements. |
| [out] | maxVelocity | maximum velocity vector to fill, has getVelocityDim() elements. |
Reimplemented from Rcs::ObservationModel.
Definition at line 70 of file OMTaskSpaceDiscrepancy.cpp.
|
virtual |
The number of state variables.
Implements Rcs::ObservationModel.
Definition at line 60 of file OMTaskSpaceDiscrepancy.cpp.
|
virtual |
Provides names for each state entry.
Reimplemented from Rcs::ObservationModel.
Definition at line 99 of file OMTaskSpaceDiscrepancy.cpp.
|
overridevirtual |
The number of velocity variables. The default implementation assumes that for each state there is a velocity.
Reimplemented from Rcs::ObservationModel.
Definition at line 65 of file OMTaskSpaceDiscrepancy.cpp.
|
overridevirtual |
Reset any internal state. This is called to begin a new episode. It should also reset values depending on modifiable physics parameters. This is an optional operation, so the default implementation does nothing.
Reimplemented from Rcs::ObservationModel.
Definition at line 93 of file OMTaskSpaceDiscrepancy.cpp.
|
private |
Definition at line 79 of file OMTaskSpaceDiscrepancy.h.
|
private |
Definition at line 78 of file OMTaskSpaceDiscrepancy.h.
|
private |
Definition at line 82 of file OMTaskSpaceDiscrepancy.h.
 1.8.13
1.8.13