#include <RcsPyBot.h>
Definition at line 51 of file RcsPyBot.h.
◆ RcsPyBot() [1/3]
Create the bot from the given property source.
- Parameters
-
| propertySource | configuration |
Definition at line 66 of file RcsPyBot.cpp.
◆ ~RcsPyBot()
| Rcs::RcsPyBot::~RcsPyBot |
( |
| ) |
|
|
virtual |
◆ RcsPyBot() [2/3]
| Rcs::RcsPyBot::RcsPyBot |
( |
const RcsPyBot & |
| ) |
|
|
delete |
◆ RcsPyBot() [3/3]
◆ getAction()
| MatNd * Rcs::RcsPyBot::getAction |
( |
| ) |
const |
Get storage matrix for current action.
WARNING: the contents may update asynchronously. The dimensions are constant.
Definition at line 201 of file RcsPyBot.cpp.
◆ getConfig()
◆ getControlPolicy()
◆ getObservation()
| MatNd * Rcs::RcsPyBot::getObservation |
( |
| ) |
const |
Get storage matrix for current observation.
WARNING: the contents may update asynchronously. The dimensions are constant.
Definition at line 196 of file RcsPyBot.cpp.
◆ operator=() [1/2]
◆ operator=() [2/2]
◆ setControlPolicy()
| void Rcs::RcsPyBot::setControlPolicy |
( |
ControlPolicy * |
controlPolicy, |
|
|
const MatNd * |
q_des = nullptr |
|
) |
| |
Replace the control policy. This method may be called while the bot is running. Setting controlPolicy tonullptr and q_des to a joint config causes the bot to go to this configuration. Does not take ownership.
Definition at line 129 of file RcsPyBot.cpp.
◆ syncGraphsToCurrent()
| void Rcs::RcsPyBot::syncGraphsToCurrent |
( |
| ) |
|
◆ updateControl()
| void Rcs::RcsPyBot::updateControl |
( |
| ) |
|
|
protectedvirtual |
◆ action
| MatNd* Rcs::RcsPyBot::action |
|
protected |
◆ allJointsPosCtrl
| bool Rcs::RcsPyBot::allJointsPosCtrl |
|
protected |
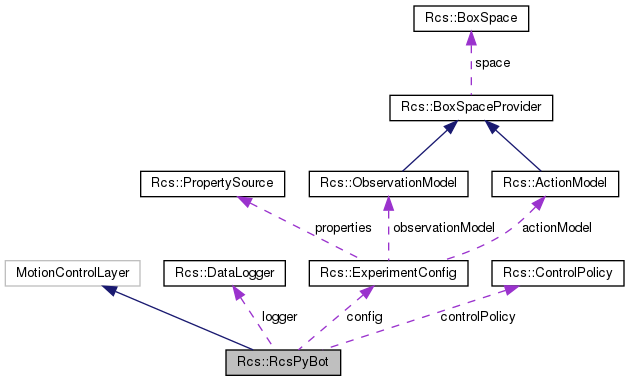
◆ config
Experiment configuration.
Definition at line 110 of file RcsPyBot.h.
◆ controlPolicy
◆ controlPolicyMutex
| std::mutex Rcs::RcsPyBot::controlPolicyMutex |
|
mutableprotected |
Control policy mutex (mutable to allow using it from const functions)
Definition at line 107 of file RcsPyBot.h.
◆ homePoseFilt
| Rcs::SecondOrderLPFND* Rcs::RcsPyBot::homePoseFilt |
Filter for going to the home pose.
Definition at line 101 of file RcsPyBot.h.
◆ logger
◆ observation
| MatNd* Rcs::RcsPyBot::observation |
|
protected |
◆ q_ctrl
| MatNd* Rcs::RcsPyBot::q_ctrl |
|
protected |
◆ qd_ctrl
| MatNd* Rcs::RcsPyBot::qd_ctrl |
|
protected |
◆ T_ctrl
| MatNd* Rcs::RcsPyBot::T_ctrl |
|
protected |
The documentation for this class was generated from the following files:


 1.8.13
1.8.13