|
RcsPySim
A robot control and simulation library
|


|
|
RcsPySim
A robot control and simulation library
|
|
#include <DynamicalSystem.h>
Public Member Functions | |
| virtual void | step (Eigen::VectorXd &x_dot, const Eigen::VectorXd &x, double dt) const |
| virtual void | step (Eigen::VectorXd &x_ddot, const Eigen::VectorXd &x_dot, const Eigen::VectorXd &x, double dt) const =0 |
 Public Member Functions inherited from Rcs::DynamicalSystem Public Member Functions inherited from Rcs::DynamicalSystem | |
| DynamicalSystem ()=default | |
| virtual | ~DynamicalSystem ()=default |
| virtual DynamicalSystem * | clone () const =0 |
| virtual Eigen::VectorXd | getGoal () const =0 |
| virtual void | setGoal (const Eigen::VectorXd &x_des)=0 |
| virtual double | goalDistance (const Eigen::VectorXd &x_curr) const |
| unsigned int | getStateDim () const |
Additional Inherited Members | |
| Static Public Member Functions inherited from Rcs::DynamicalSystem | |
| static DynamicalSystem * | create (PropertySource *properties, unsigned int innerTaskDim) |
| Public Attributes inherited from Rcs::DynamicalSystem | |
| Eigen::VectorXd | x_dot_des |
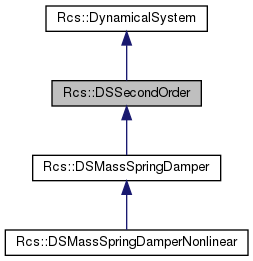
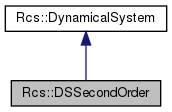
A second-order dynamical system generates desired acceleration values. The acceleration is integrated to output desired velocities.
Definition at line 107 of file DynamicalSystem.h.
|
virtual |
|
pure virtual |
Advance the dynamical system one step in time. Compute the acceleration x_ddot given the velocity x_dot and the state x, and the time step size dt.
| [out] | x_ddot | fill with desired acceleration, is not initialized |
| [in] | x_dot | current velocity |
| [in] | x | current state |
| [in] | dt | time step size for integration |
Implemented in Rcs::DSMassSpringDamperNonlinear, and Rcs::DSMassSpringDamper.
 1.8.13
1.8.13