|
RcsPySim
A robot control and simulation library
|


|
|
RcsPySim
A robot control and simulation library
|
|
#include <DynamicalSystem.h>
Public Member Functions | |
| DSMassSpringDamperNonlinear (const Spring &attractor, const std::vector< Spring > &repellers, const double damping, const double mass=1.0) | |
| virtual DynamicalSystem * | clone () const |
| void | step (Eigen::VectorXd &x_ddot, const Eigen::VectorXd &x_dot, const Eigen::VectorXd &x, double dt) const |
 Public Member Functions inherited from Rcs::DSMassSpringDamper Public Member Functions inherited from Rcs::DSMassSpringDamper | |
| DSMassSpringDamper (const Spring &attractor, const std::vector< Spring > &repellers, const double damping, const double mass=1.0) | |
| Eigen::VectorXd | getGoal () const |
| void | setGoal (const Eigen::VectorXd &x_des) |
| Public Member Functions inherited from Rcs::DSSecondOrder | |
| virtual void | step (Eigen::VectorXd &x_dot, const Eigen::VectorXd &x, double dt) const |
| Public Member Functions inherited from Rcs::DynamicalSystem | |
| DynamicalSystem ()=default | |
| virtual | ~DynamicalSystem ()=default |
| virtual double | goalDistance (const Eigen::VectorXd &x_curr) const |
| unsigned int | getStateDim () const |
Additional Inherited Members | |
| Static Public Member Functions inherited from Rcs::DynamicalSystem | |
| static DynamicalSystem * | create (PropertySource *properties, unsigned int innerTaskDim) |
| Public Attributes inherited from Rcs::DynamicalSystem | |
| Eigen::VectorXd | x_dot_des |
| Protected Attributes inherited from Rcs::DSMassSpringDamper | |
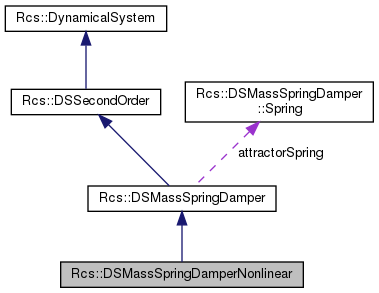
| Spring | attractorSpring |
| std::vector< Spring > | repellerSprings |
| double | damping |
| double | mass |
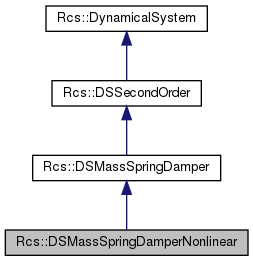
Clampled Nonlinear Mass-Spring-Damper Dynamical System
Definition at line 228 of file DynamicalSystem.h.
| Rcs::DSMassSpringDamperNonlinear::DSMassSpringDamperNonlinear | ( | const Spring & | attractor, |
| const std::vector< Spring > & | repellers, | ||
| const double | damping, | ||
| const double | mass = 1.0 |
||
| ) |
Constructor
| [in] | attractor | attractor spring pulling the mass to the goal poisiton (there is only one) |
| [in] | repellers | repeller springs pushing the mass away from points in space |
| [in] | damping | of the dynamical system (there is only on) |
| [in] | mass | mass of the particle (default: unit mass 1kg) |
Definition at line 337 of file DynamicalSystem.cpp.
|
virtual |
Create a deep copy of this DynamicalSystem.
Reimplemented from Rcs::DSMassSpringDamper.
Definition at line 343 of file DynamicalSystem.cpp.
|
virtual |
Advance the dynamical system one step in time. Compute the acceleration x_ddot given the velocity x_dot and the state x, and the time step size dt.
| [out] | x_ddot | fill with desired acceleration, is not initialized |
| [in] | x_dot | current velocity |
| [in] | x | current state |
| [in] | dt | time step size for integration |
Reimplemented from Rcs::DSMassSpringDamper.
Definition at line 348 of file DynamicalSystem.cpp.
 1.8.13
1.8.13